Arnold NextG Blogspot: Drive-by-Wire Decoded – Vehicle Control for Autonomous Systems
In the discussion surrounding electronic vehicle control, it is often implicitly assumed that a functioning overall system can be assembled from high-quality individual components. Steer-by-wire steering, brake-by-wire braking, redundant control units—all these technologies exist and, in many cases, are already safety-certified.
The conclusion seems obvious: if every single component is safe on its own, the overall system must also be safe. From a technical perspective, however, this assumption falls short. This is because the safety, availability, and controllability of autonomous vehicles do not result from the sum of individual functions—but rather from the behavior of the overall system.
Why Safety Is Not Additive
In traditional vehicle architectures, it was long acceptable to view safety primarily at the component level. The driver served as the overarching authority who could intervene in case of doubt. Systems were therefore often designed to transition to a safe state in the event of a failure—for example, by shutting down or reverting to mechanical functions. Autonomous vehicles fundamentally change this logic.
When there is no longer a driver present, the system itself becomes the final decision-maker. Safety then no longer arises from isolated functions, but from the coordinated interaction of all subsystems—including their interfaces, dependencies, and failure modes. For example, a brake-by-wire module can be ASIL-D compliant, as can a steer-by-wire system in accordance with the functional safety requirements of ISO 26262.
But what matters is how both systems behave when working together:
What happens if multiple functions are operating in degraded mode simultaneously?
How do systems react when communication paths are limited?
What priorities apply in borderline cases? Such questions cannot be answered at the component level. They must be decided at the system level.
The integration gap in practice
This is precisely where a structural challenge in the market becomes apparent. Many OEMs, system integrators, or operators of autonomous fleets receive highly developed drive-by-wire modules from suppliers. These components are powerful, certified, and technically mature. What they often fail to provide, however, is a definitive statement regarding the behavior of the overall system.
The consequence: Responsibility for integration, safety justification, and fail-operational strategies shifts to the vehicle manufacturer or integrator. They must decide how components are combined, how redundancies interact, and how the vehicle remains controllable in the event of a failure. Thus, integration itself becomes a safety-critical system task.
Drive-by-Wire as an Architectural Issue
A true drive-by-wire system therefore does not begin with the selection of individual components, but with the architecture. Key elements include, among others:
- clear separation and redundancy of safety-critical functions
- deterministic communication paths in the vehicle network
- coordinated control and monitoring mechanisms
- consistent energy management
- a system-wide safety concept
What matters here is not only that redundancy is present, but how it is utilized. Redundancy without systemic logic leads, at best, to a standstill—and, at worst, to unpredictable behavior. Systemic thinking therefore means integrating these aspects from the very beginning, rather than only during integration.
Platform independence as a system criterion
Another hallmark of systemic maturity is platform independence. Many drive-by-wire solutions are tightly tied to specific vehicle platforms. This facilitates series integration but complicates portability to other vehicle types or existing fleets. However, autonomous applications rarely emerge exclusively on new platforms. Often, existing vehicles are automated or teleoperated.
For such scenarios, drive-by-wire architectures are required that can be adapted to different vehicle platforms without redefining their safety logic. This capability, too, is not a property of individual components, but rather the result of a systemic architectural decision.
When Vehicle Control Becomes System Responsibility
System responsibility means more than just supplying individual components. It also encompasses the ability to make statements about a vehicle’s overall behavior—technically, regulatorily, and operationally.
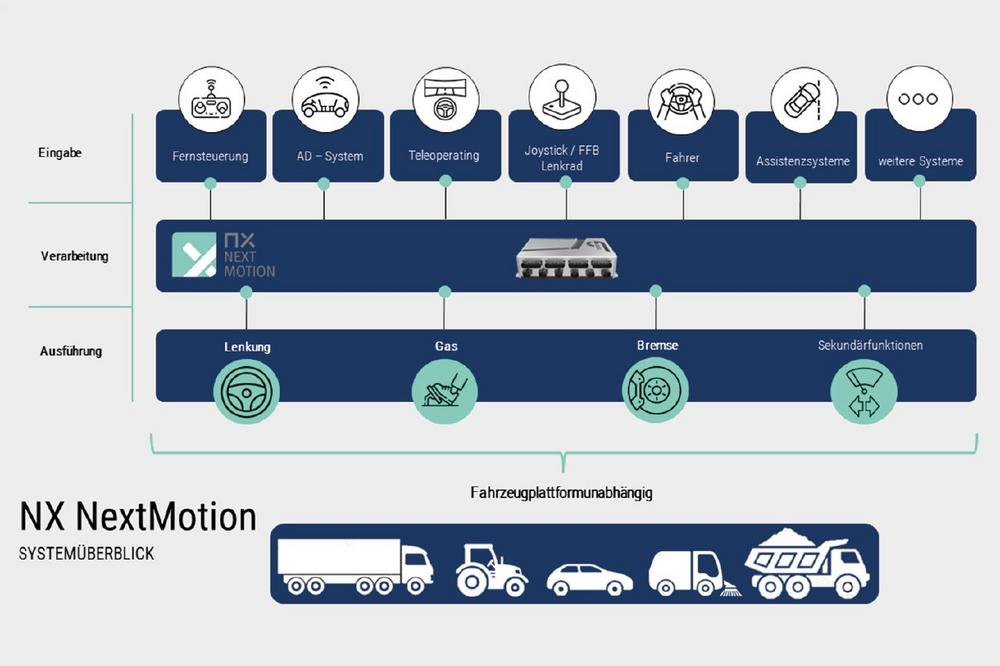
Platform approaches such as NX NextMotion from Arnold NextG pursue precisely this systemic approach. The drive-by-wire control platform integrates steering, braking, propulsion, and other vehicle functions into a shared, multi-redundant, and fail-operational architecture. The goal of such architectures is to view vehicle control not as a collection of individual functions, but as a coherent overall system.
A Necessary Shift in Perspective
For developers, integrators, and operators of autonomous systems, this raises a central question. No longer: Which components are available? But rather:
Who takes responsibility for the system? As long as drive-by-wire is primarily viewed as a modular system, autonomous driving remains an integration project. Only when vehicle control is conceived as an integrated overall system does the foundation for scalable and safe operation of autonomous vehicles emerge.
Outlook
In the next post in this series, we’ll examine a frequently misunderstood core concept of modern vehicle architectures: the difference between fail-safe and fail-operational—and why this distinction is not merely theoretical but practically crucial for autonomous systems.
WE CONTROL WHAT MOVES
more information: www.arnoldnextg.com/blog
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()




