Arnold NextG Blogspot: Drive-by-Wire Decoded – Vehicle Control for Autonomous Systems
Autonomous driving is usually discussed in terms of sensor technology, AI, and computing power. However, one key prerequisite often remains in the background: the safe control of vehicle movement. Electronic steering, braking, and drive systems have been part of modern vehicle architectures for years. Accordingly, many consider X-by-wire to be a mature technology. Established supply chains, well-known industry players, and numerous series applications give the impression of a largely decided market.
However, a closer look reveals a different picture – especially where drive-by-wire is not understood as a comfort or assistance function, but as the basis for autonomous driving or teleoperation. This is because what is often referred to as drive-by-wire today is usually individual solutions or subsystems in practice. Fully integrated, fail-operational vehicle control at the system level remains the exception.
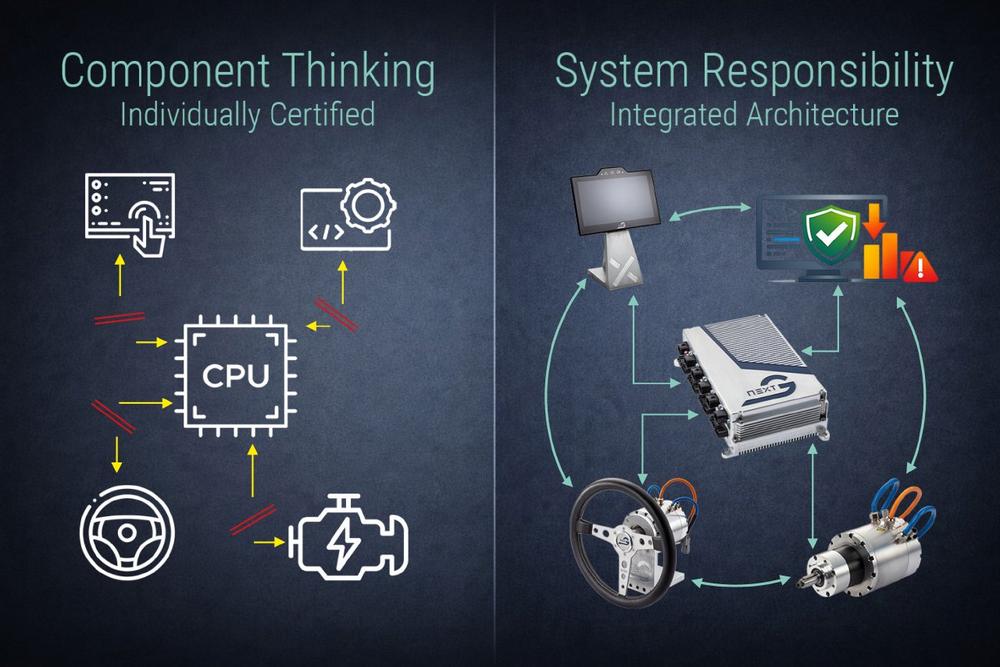
Components are not the same as systems
From a technical point of view, drive-by-wire is not a single product, but an architectural issue. A true drive-by-wire system does not just replace mechanical connections with electrical signals. It must ensure that a vehicle remains controllable under all operating conditions – even if individual components fail.
This includes, among other things:
- an integrated combination of actuators, sensors, and control units
- Redundant communication and power supply
- a consistent software and control architecture
- A system-wide safety concept
- clear responsibility for the overall behavior of the vehicle
The safety requirements for such systems are based, among other things, on standards such as ISO 26262 for functional safety. In practice, however, OEMs or system integrators often do not receive complete systems, but rather individual components – such as steer-by-wire or brake-by-wire modules, each with its own certification.
The integration into the overall system, the definition of fail-operational behavior, and the overall safety argumentation therefore often remain with the vehicle manufacturer. This is not a quality defect of individual components, but the result of a market that has historically grown along product lines rather than along system responsibility.
Why large suppliers rarely deliver complete systems
In retrospect, this situation is understandable. Many drive-by-wire solutions have evolved from existing mechanical vehicle architectures. They were developed for vehicles in which a human being is available as a last resort. Accordingly, fail-safe concepts dominate, in which a system switches to a safe state in the event of a fault – for example, by shutting down or handing over control to the driver.
However, autonomous vehicles have different requirements. If there is no driver, the system cannot simply shut down. It must be able to continue operating in a controlled manner. This requires fail-operational system architectures in which redundancy, fault detection, and continued operation are considered systemically from the outset.
This topic is also becoming increasingly important from a regulatory perspective. International regulations such as UNECE Regulation R79 for electronic steering systems define requirements for safety-critical vehicle control.
A market at the system level – and that’s exactly why it’s open
At the component level, the drive-by-wire market is well developed. At the system level, however, this is not the case. Worldwide, there are only a limited number of companies that can actually supply a complete drive-by-wire system – including hardware, software, redundancy concept, and system-wide safety argumentation from a single source.
Even rarer are solutions that work independently of the platform and are suitable for both new vehicle platforms and retrofitting existing fleets. Especially in areas such as logistics, agriculture, mining, construction, defense, or public transportation, autonomy rarely starts on a completely new platform. Existing vehicles are often automated or teleoperated. This means that the retrofitability of drive-by-wire systems is becoming more central to architectural decisions.
Platform approaches such as Arnold NextG’s NX NextMotion drive-by-wire control platform target precisely this system level: they integrate steering, brakes, drive, and other vehicle functions into a common, multi-redundant, and fail-operational control architecture—regardless of the vehicle platform.
Vehicle control as the foundation of autonomous systems
The discussion about autonomous mobility is often dominated by perception systems and artificial intelligence. But even the most powerful AI can only move a vehicle as safely as the underlying control architecture allows. Only when vehicle control is understood as an integrated system – and not as a collection of individual components – can autonomy be reliably transferred into real-world applications.
Against this backdrop, new platform approaches for fully electronic vehicle control are emerging. Platforms such as NX NextMotion, for example, aim to combine steering, brakes, drive, and other vehicle functions in a common, multi-redundant drive-by-wire architecture. The market for true drive-by-wire is therefore far from decided. Not because of a lack of technology, but because systems thinking, architectural responsibility, and operational experience rarely come together.
Outlook
In the next article in this series, we will look at a key architectural decision in modern vehicle control: the difference between fail-safe and fail-operational – and why this distinction is practically crucial for autonomous systems.
WE CONTROL WHAT MOVES!
Further information is available at: www.arnoldnextg.com/blog
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()