-
Arnold NextG Blogspot: The stakeholder map – Who builds, regulates, and operates autonomous mobility
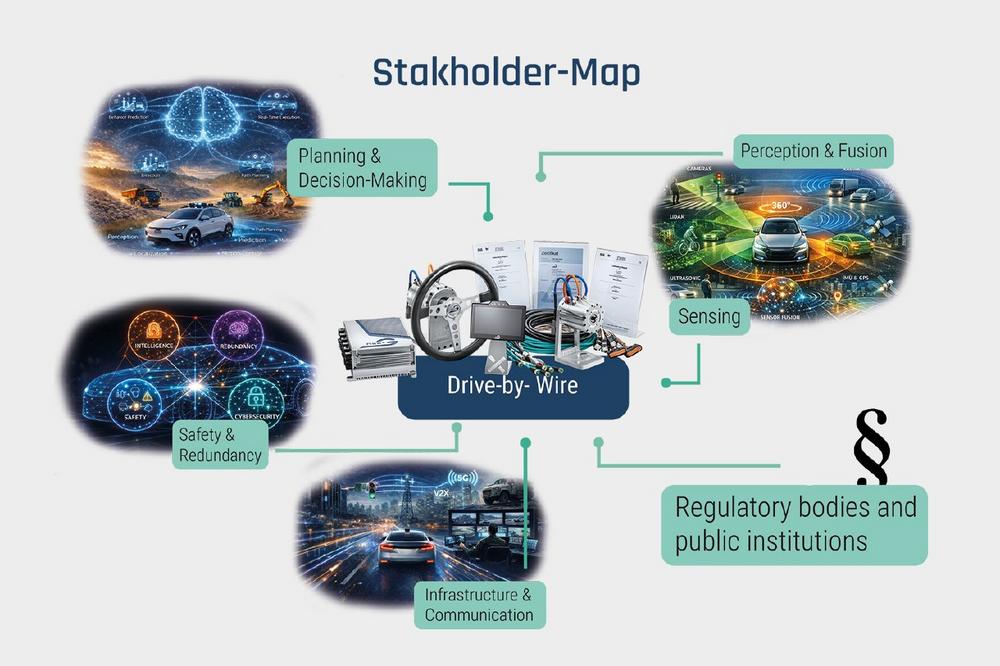
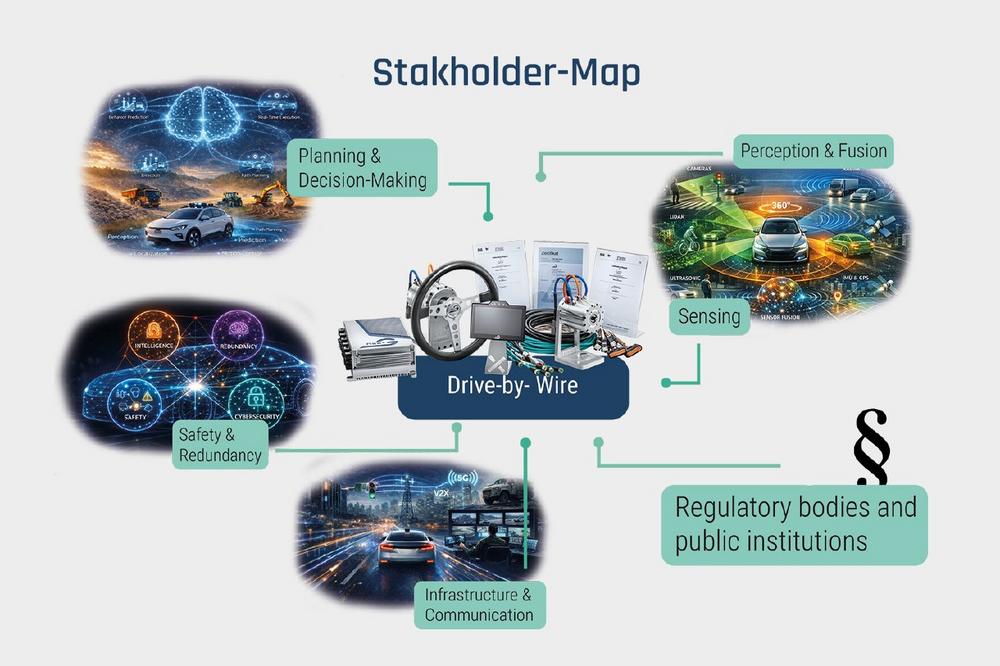
Autonomous mobility does not happen in isolation. Behind every driverless vehicle is a network of players with clearly defined roles, responsibilities, and regulatory requirements. For OEMs and Tier 1 suppliers, this means that autonomy is not a feature, but rather a system cooperation. The central question is therefore no longer: Who builds the vehicle? But rather: Who is responsible for which level in the overall system? OEMs and Tier 1 suppliers: From vehicle platform to system platform OEMs continue to bear overall responsibility for the vehicle. But the differentiation is shifting: mechanical performance values are taking a back seat to software compatibility, E/E architecture, and system openness. Tier 1 suppliers…
-
Arnold NextG Blogspot: Die Stakeholder-Landkarte – Wer autonome Mobilität baut, reguliert und betreibt
Autonome Mobilität entsteht nicht im Alleingang. Hinter jedem fahrerlosen Fahrzeug steht ein Netzwerk aus Akteuren mit klar definierten Rollen, Verantwortlichkeiten und regulatorischen Vorgaben. Für OEMs und Tier-1-Zulieferer bedeutet das: Autonomie ist kein Feature, sondern eine Systemkooperation. Die zentrale Frage lautet daher nicht mehr: Wer baut das Fahrzeug? Sondern: Wer verantwortet welche Ebene im Gesamtsystem? OEMs und Tier-1-Zulieferer: Von der Fahrzeugplattform zur Systemplattform OEMs tragen weiterhin die Gesamtverantwortung für das Fahrzeug. Doch die Differenzierung verschiebt sich: Mechanische Leistungswerte treten hinter Softwarekompatibilität, E/E-Architektur und Systemoffenheit zurück. Tier-1-Zulieferer entwickeln sich dabei zu Integrationspartnern für sicherheitskritische Subsysteme. Brems-, Lenk- und Antriebssysteme müssen nicht nur funktionieren, sondern softwaredefiniert, zertifizierbar und fernsteuerbar sein. Arnold NextG positioniert…
-
Arnold NextG Blogspot: Focus on industries – How autonomy is redefining industry-specific mobility
Autonomous mobility is not a universal solution. Requirements, regulatory frameworks, and risk profiles differ fundamentally depending on whether a vehicle operates in city traffic, at a port terminal, in a mine, or in military service. For OEMs and Tier 1 suppliers, this means that autonomy is not a product, but an adaptable system concept. While the technological cornerstones – perception, planning, connectivity, and drive-by-wire – are broadly similar, domain-specific design determines cost-effectiveness and approval eligibility. Autonomy must adapt to the industry, not the other way around. Public transport: Efficiency and inclusion in geofenced operation In public transport, autonomous systems are mainly used as Level 4 shuttles in clearly defined operating…
-
Arnold NextG Blogspot: Branchen im Fokus – Wie Autonomie branchenspezifische Mobilität neu definiert
Autonome Mobilität ist keine universelle Lösung. Anforderungen, regulatorische Rahmenbedingungen und Risikoprofile unterscheiden sich fundamental – je nachdem, ob ein Fahrzeug im Stadtverkehr, auf einem Hafenterminal, in einer Mine oder im militärischen Einsatz operiert. Für OEMs und Tier-1-Zulieferer bedeutet das: Autonomie ist kein Produkt, sondern ein anpassbares Systemkonzept. Während die technologischen Grundpfeiler – Wahrnehmung, Planung, Konnektivität und Drive-by-Wire – übergreifend ähnlich sind, entscheidet die domänenspezifische Ausgestaltung über Wirtschaftlichkeit und Zulassungsfähigkeit. Autonomie muss sich der Branche anpassen, nicht umgekehrt. Öffentlicher Verkehr: Effizienz und Inklusion im geofenceten Betrieb Im öffentlichen Verkehr werden autonome Systeme überwiegend als Level-4-Shuttles in klar definierten Betriebsgebieten eingesetzt. Ziel ist es, Regionen mit geringer Nachfrage wirtschaftlich zu erschließen, Betriebskosten…
-
Arnold NextG Blogspot: Infrastructure, Connectivity & Teleoperation – The invisible backbone of autonomous systems
When people talk about autonomous driving, the focus is usually on vehicles, algorithms, and sensor technology. But autonomy does not arise in isolation within the vehicle. It is the result of a networked ecosystem of digital infrastructure, communication networks, map services, edge computing power, and control center architecture. Without this foundation, even the most powerful autonomous system remains operationally limited. In recent publications, international expert committees such as ASAM emphasize that the "intelligence" of automated systems is increasingly shifting from the vehicle to a distributed overall system consisting of infrastructure and backend components (ASAM Automated Driving Infrastructure Report, 2024). For OEMs and system integrators, this means that autonomy is a…
-
Arnold NextG Blogspot: Infrastruktur, Konnektivität & Teleoperation – Das unsichtbare Rückgrat autonomer Systeme
Wenn über autonomes Fahren gesprochen wird, stehen meist Fahrzeuge, Algorithmen und Sensorik im Mittelpunkt. Doch Autonomie entsteht nicht isoliert im Fahrzeug. Sie ist das Ergebnis eines vernetzten Ökosystems aus digitaler Infrastruktur, Kommunikationsnetzen, Kartenservices, Edge-Rechenleistung und Leitstellenarchitektur. Ohne dieses Fundament bleibt selbst das leistungsfähigste autonome System operativ eingeschränkt. Internationale Fachgremien wie ASAM betonen in aktuellen Veröffentlichungen, dass sich die „Intelligenz“ automatisierter Systeme zunehmend vom Fahrzeug auf ein verteiltes Gesamtsystem aus Infrastruktur- und Backend-Komponenten verlagert (ASAM Automated Driving Infrastructure Report, 2024). Für OEMs und Systemintegratoren bedeutet das: Autonomie ist eine Systemarchitekturfrage – nicht nur eine Fahrzeugfunktion. Infrastruktur als operative Voraussetzung Autonome Fahrzeuge greifen kontinuierlich auf externe Datenquellen zurück. Dazu zählen hochauflösende HD-Karten…
-
Arnold NextG Blogspot: Safety, Redundancy & Cybersecurity – How Trust in Autonomous Systems is Created
Autonomous systems promise efficiency, availability, and new mobility concepts. But regardless of how powerful perception or decision-making software is, trust can only be established if the overall system remains reliable, resilient, and controllable – even under fault conditions. As soon as vehicles operate without human supervision, safety becomes a basic requirement for every function. Three closely interlinked disciplines are at the heart of this: functional safety, redundancy architectures, and cybersecurity. They define whether autonomous systems are not only technically feasible, but also regulatory approvable and socially acceptable. Functional safety: Predictable behavior instead of error-free operation Functional safety does not aim to completely avoid errors. It ensures that systems react in…
-
Arnold NextG Blogspot: Sicherheit, Redundanz & Cybersecurity – Wie Vertrauen in autonome Systeme entsteht
Autonome Systeme versprechen Effizienz, Verfügbarkeit und neue Mobilitätskonzepte. Doch unabhängig davon, wie leistungsfähig Wahrnehmung oder Entscheidungssoftware sind, entsteht Vertrauen nur dann, wenn das Gesamtsystem zuverlässig, resilient und beherrschbar bleibt – auch unter Fehlerbedingungen. Sobald Fahrzeuge ohne menschliche Aufsicht operieren, wird Sicherheit zur Grundvoraussetzung jeder Funktion. Im Zentrum stehen dabei drei eng verzahnte Disziplinen: funktionale Sicherheit, Redundanzarchitekturen und Cybersecurity. Sie definieren, ob autonome Systeme nicht nur technisch möglich, sondern auch regulatorisch genehmigungsfähig und gesellschaftlich akzeptiert sind. Funktionale Sicherheit: Vorhersehbares Verhalten statt Fehlerfreiheit Funktionale Sicherheit zielt nicht darauf ab, Fehler vollständig zu vermeiden. Sie stellt sicher, dass Systeme auch im Fehlerfall kontrolliert, nachvollziehbar und risikoarm reagieren. Für autonome Fahrzeuge bilden internationale Normen…
-
Arnold NextG Blogspot: Software as the brain – How autonomous vehicles plan and make decisions
Autonomous vehicles detect their surroundings, steer, brake, and accelerate – but the real core of autonomy lies in between: in the software that plans, predicts, and decides. This is precisely where driving behavior is created from data. And this is precisely where it is decided whether a system is truly autonomous – or merely reactive. Each control cycle involves a complex chain of events: the environment is scanned, objects are classified, and the vehicle’s own location is determined. The system then predicts the behavior of other road users, calculates a safe path, and implements it immediately via drive-by-wire. This process is repeated every ten to 50 milliseconds – faster than…
-
Arnold NextG Blogspot: Die Software als Gehirn – Wie autonome Fahrzeuge planen und entscheiden
Autonome Fahrzeuge erfassen ihre Umgebung, sie steuern, bremsen, beschleunigen – doch der eigentliche Kern der Autonomie liegt dazwischen: in der Software, die plant, vorhersagt und entscheidet. Genau hier entsteht aus Daten ein Fahrverhalten. Und genau hier entscheidet sich, ob ein System wirklich autonom ist – oder nur reaktiv. In jedem Steuerzyklus wird eine komplexe Kette durchlaufen: Die Umgebung wird erfasst, Objekte klassifiziert, das eigene Fahrzeug lokalisiert. Dann prognostiziert das System das Verhalten anderer Verkehrsteilnehmer, berechnet einen sicheren Pfad – und setzt diesen unmittelbar über Drive-by-Wire um. Dieser Ablauf wiederholt sich alle zehn bis 50 Millisekunden – schneller als ein menschlicher Wimpernschlag. Wie Prof. J. Christian Gerdes vom Center for Automotive…