Architecture of an integrated Park-in and Park-out system
The park-in and park-out system include sensing and perception, mode and state management, planning, and vehicle motion control. In most of the existing solutions of parking systems, most often researchers focus on the complexity of path planning geometry or accurate control system development for a park assist system and thus most often create a hiatus at the system level for transforming the data flow from sensing to actuation system to aid successful manoeuvre for conventional parking. This article discusses the end- to-end solution of parking assistance to manoeuvre the vehicle in a parking space. The constraints in parking space often summons the multi-actuation parking system requirement, which essentially increases the complexity of path planning and decision control. The composite motion control mechanism of lateral and longitudinal aids help in parking manoeuvre and provide an edge over the conventional approach of steering the vehicle at a constant speed.
The development approach of the park assist system includes:
- System engineering
- Requirement derivation of park-assist system
- Establishment of key performance indicator definition for performance evaluation
These steps are followed by component design, model development and system validation.
The architecture of a park-in and park-out system inherently determines the system level flow of the autonomous driving system. The concept and design are further derivatives of system architecture into the component level to aid development and model implementation. The designed system has undertaken prototype evaluation at simulation level with off-the-shelf vehicle dynamics in loop to ensure robustness and performance of an integrated park-in and park-out feature.
I. Architecture of Park Assist System
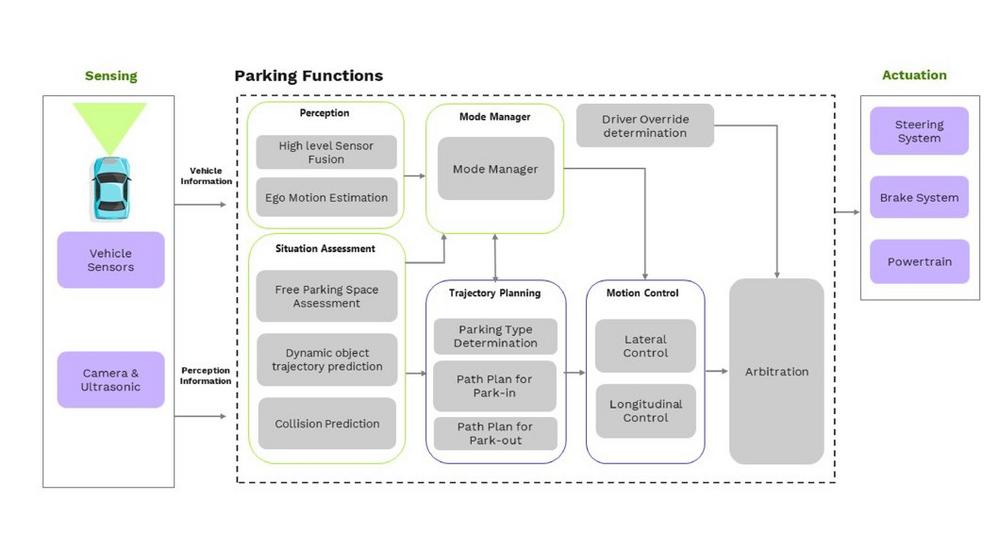
The article presents an architecture of an automated system to aid the driver in parking the host vehicle in an assessed parking space. The auto parking feature often summons the mechanism of determining parallel and perpendicular parking space availability using low-cost sensing devices (e.g., ultrasonic, camera sensors) for positioning the host vehicle in the parking slot with an orientation of neighbouring parked vehicles. The system-level architecture of the park-in and park-out system is as presented in figure 1:
The significant attributes of prior art either focused on the path planning complexities or vehicle motion control for parking manoeuvre, however it fails to appreciate end-to-end solution of park assist system with park out provision. The comprehensive architecture of integrated parallel and perpendicular park-in is presented herewith as a state of the art which includes initial forward shipping to align host vehicle for park-in manoeuvre after successful free space determination followed by a reverse manoeuvre to position vehicle in the assessed parking slot. Furthermore, the park-in feature is associated with the park-out function; the user can only initiate the park-out manoeuvre through tablet or HMI when a predetermined time would have elapsed after successful park-in.
II. Logical components And design of Park assist system
System architecture development remains an integral activity in the development life cycle and provides a systematic approach for an automated feature development. The assisted park-in and park-out feature consists of the following major functions: perception and object fusion, situation assessment, mode management, trajectory planning, and lateral and longitudinal motion control. The proposed logical architecture designed in the enterprise architect tool (as illustrated in figure 2) outweighs the conventional approach with modularity at the software component level during the design phase while facilitating sequential data flow from input modules of perception to output actuation system.
The perception function aids in ego-motion estimation and fused traffic attributes based on information received from the camera and ultrasonic sensors whereas, the situation assessment module performs free slot determination, in-path dynamic traffic vehicle or pedestrian assessment, and collision prediction. The free parking space assessment module then evaluates the dynamic threat and possibility of park-in, which is further associated with trajectory planning and motion control for park-in manoeuvre. The trajectory planning function helps generate the optimal collision-free path for single or multiple manoeuvres based on space constraints; furthermore, the motion controller ensures vehicle navigation in the planned parking trajectory with minimum positional error. The mode manager controls the transition between defined auto parking modes and further aids in determining the operation of functional modules during changes. The perception and situation assessment block will watch and accessed the requisite parking space for parking: the park-in and park-out trajectory planning and motion control remain activated upon successful determination of requisite parking space for auto park-in or collision-free pathway for assisted park-out to get initiated.
III. Developement approach Of assisted park-in and park-out System
The automatic forward movement of the vehicle followed by reverse manoeuvre while tracking planned trajectory from parking aisle to parking slot based on auto park assist initiation by the user remains a predominant part of this feature. This feature development includes perception and sensor fusion attributes, mode management and decision control to guide both longitudinal and lateral motion of host vehicle simultaneously in an assisted mode. The architecture of the park assist system is translated to a feature model through a model-based development approach. The modularity of the feature model has provided a scope of flexibility in design and adaptation for handling different variants of operational attributes and sensing topologies. The prevalent attributes of the feature development process while providing an end-to-end solution for assisted parking use case scenarios are as articulated below:
- Development of logical architecture, derivation of system and component level requirements for a park assist system from user specification, critical scenarios, etc. are as illustrated in figure 3.
- Concept design and model development of parking feature associated with manoeuvre in forward and reverse gear
- Feature evaluation as per automotive standards and functional requirements
The steering actuation control mechanism is based on the concept of composite tracking unit where the longitudinal motion control aids the lateral motion tracking function. The longitudinal and lateral motion is coupled to remain a critical unit for the parking system. It allows to follow the planned trajectory precisely during a reverse manoeuvre in the park-in system and thereby aids in positioning the host vehicle accurately in the parking space, keeping heading in correlation with neighbouring parked vehicles. The composite motion control approach summons a time-sampled tracking of trajectory waypoints while nurturing the constraints of system dynamics engaged in the parking manoeuvre. The key performance indices of an auto-parking feature often get validated against an off-the-shelf vehicle dynamic model in loop to ensure system robustness. The modularity of the architecture provides freedom to use the components of planned trajectory for reverse manoeuvre park-in function for assisted and collision free park-out operation with forward shipping provided environment remain unchanged, or movement of neighbouring objects has not impacted the route of park-out manoeuvre. The situation assessment, mode manager, and driver override determination also remain functional in similar ways for both park-in and park-out operation, and thus, such modularity of software component design provides edge over conventional approach of feature design and development.
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()


